
Visual Odometry
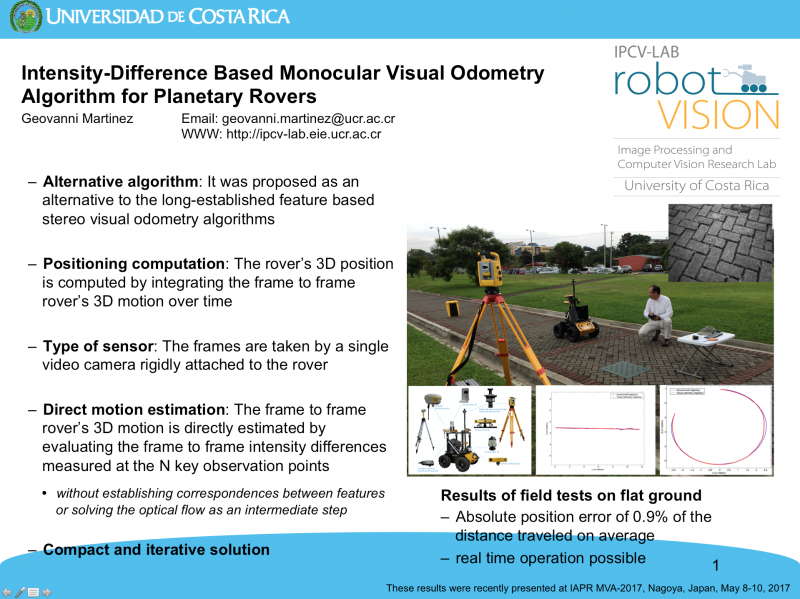
The experimental results of testing the monocular visual odometry algorithm developed by the IPCV-LAB in a real rover platform Husky A200 over flat terrain for localization in outdoor sunlit conditions were recently presented in IAPR MVA-2017. The algorithm computes the three-dimensional (3D) position of the rover by integrating its motion over time. The motion is directly estimated by maximizing a likelihood function that is the natural logarithm of the conditional probability of intensity differences measured at different observation points between consecutive images. It does not require as an intermediate step to determine the optical flow or establish correspondences. The images are captured by a monocular video camera that has been mounted on the rover looking to one side tilted downwards to the planet's surface. Most of the experiments were conducted under severe global illumination changes. Comparisons with ground truth data have shown an average absolute position error of 0.9% of distance traveled with an average processing time per image of 0.06 seconds.
See presented poster in IAPR MVA-2017 here.
Se also:
- G. Martinez, "Extending the Measurement Error Model of a Direct Visual Odometry Algorithm to Improve its Accuracy for Planetary Rover Navigation", IEEE International Conference on Applied Science and Advanced Technology (IEEE iSACAT 2019), Queretaro, Mexico, November 27-29, 2019.
- G. Martinez, "Experimental results of testing a direct monocular visual odometry algorithm outdoors on flat terrain under severe global illumination changes for Planetary Exploration Rovers", Computación y Sistemas, an International Journal of Computing Science and Applications, Vol. 22, No. 4, pp. 1581-1593, 2018.
- G. Martinez, "Improving the Robustness of a Direct Visual Odometry Algorithm for Planetary Rovers", IEEE International Conference on Electrical Engineering, Computing Science and Automatic Control (IEEE CCE-2018), Mexico, City, Mexico, September 5-7, 2018.
- G. Martinez, "Field tests on flat ground of an Intensity-difference Based Monocular Visual Odometry Algorithm for Planetary Rovers", 15th IAPR International Conference on Machive Vision Applications (IAPR MVA-2017), Nagoya, Japan, May 08-12, 2017.
- G. Martinez, “Intensity-Difference Based Monocular Visual Odometry for Planetary Rovers”, New Development in Robot Vision, Book Series: Cognitive Systems Monographs, Vol. 23, Springer, ISBN: 978-3-662-43858-9, pages 1181-198, 2014.
- G. Martinez, "Monocular Visual Odometry from Frame to Frame Intensity Differences for Planetary Exploration Mobile Robots", IEEE Worshop on Robot Vision (IEEE WoRV), Tampa Bay, Florida, USA, 16-17 January, 2013.