
IPCV-LAB's Robot Vision Group
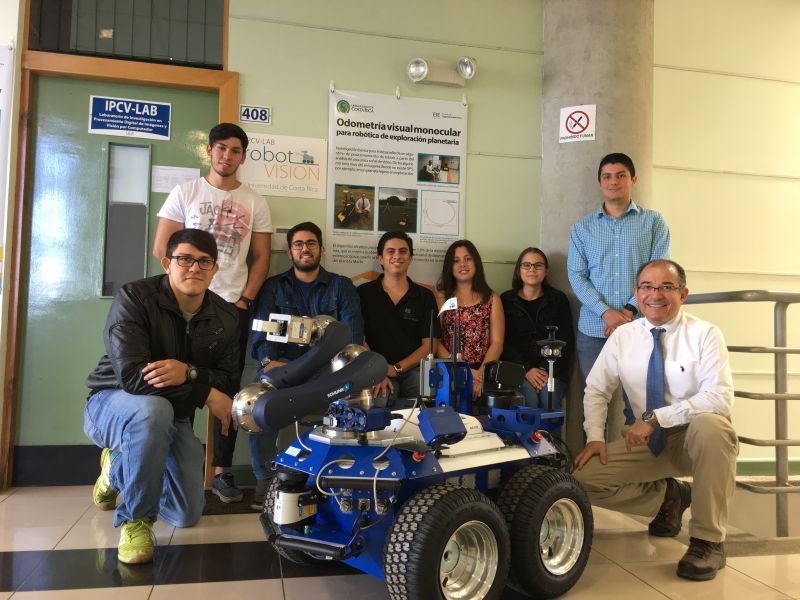
This is the IPCV-LAB's Robot Vision Group. In the back row, from left to right, Andrey Quesada, Marco Murillo, Javier Rojas, Veronica Alpizar, Carolina Obando and Esteban Vargas. In the front row, from left to right, Juan Carlos Fallas, the MobileRobots Seekur Jr. all-terrain rover, and Prof. Dr.-Ing. Geovanni Martinez. The Seekur Jr. is a skid steer, four wheel drive, all-weather robot platform which is being used in the IPCV-LAB for testing navigation systems based solely on video cameras, specifically navigation systems based on monocular visual odometry.