
Ready for outdoor testing in 2020
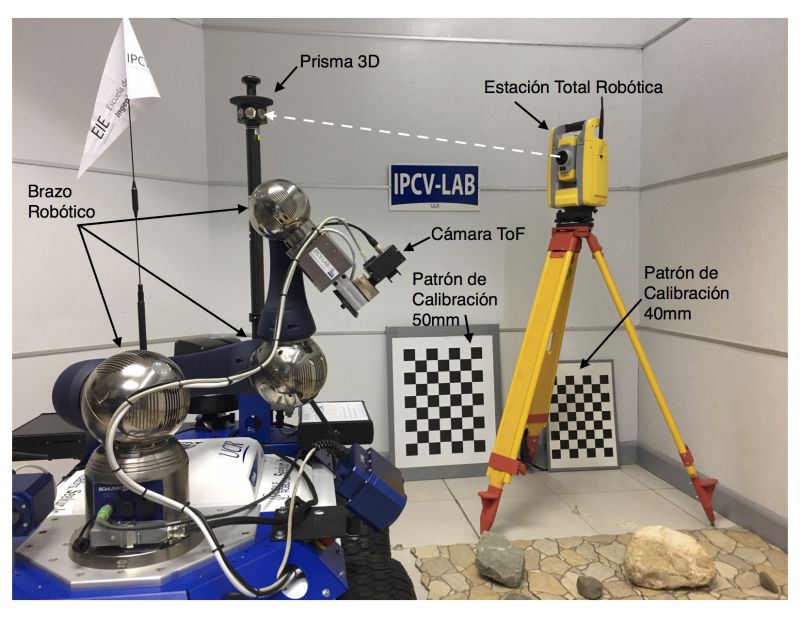
In the year 2020, the IPCV-LAB monocular visual odometry algorithm tests will be intensified outdoors. The photo shows one of the latest indoor experiments conducted during this year with the rover Seekur Jr., where new improvements in accuracy and robustness of the positioning algorithm were tested.