
Husky A200 rover used for testing of visual odometry algorithms
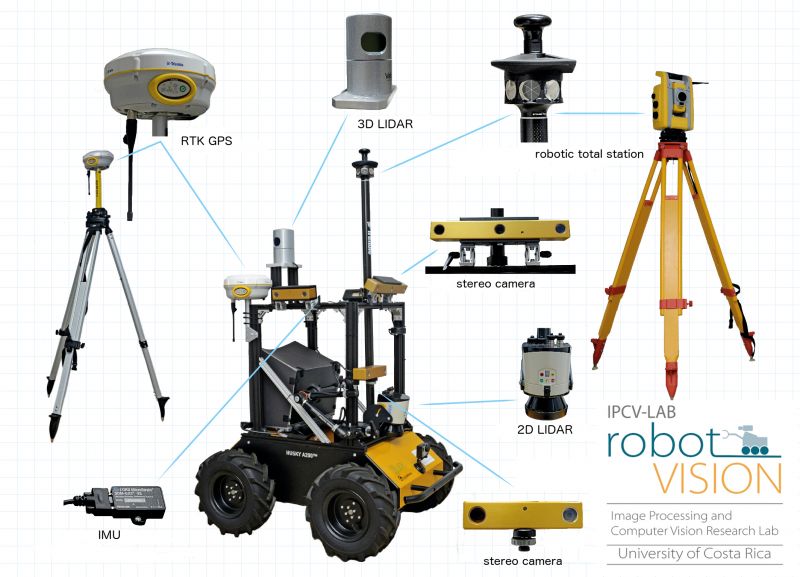
This is the robotic platform used by Dr. Geovanni Martinez's group for testing of visual odometry algorithms at the Image Processing and Computer Vision (IPCV-LAB) of the Unversity of Costa Rica. It consist of 1 Clearpath Robotics Husky A200 rover, 2 Point Grey Bumblebee2 stereo cameras, 1 Point Grey Bumblebee XB3 stereo camera, 1 Trimble R4 RTK GPS, 1 Trimble S3 Robotic Total Station, 1 Velodyne HDL-32e 3D Lidar, 1 Sick LMS151 2D Lidar and 1 MicroStrain 3DM-GX3-25 IMU.