
Image Processing and Computer Vision Research Laboratory (IPCV-LAB)
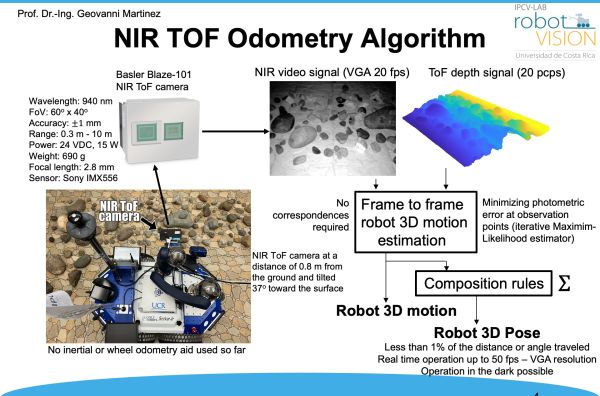




Welcome to the Image Processing and Computer Vision Research Laboratory (IPCV-LAB). Here, we conduct basic research to develop new technologies that can automatically estimate the shape, color, position, orientation and motion of real objects from multidimensional signals, such as video and depth signals. These technologies have a range of applications, including autonomous robotics, teleoperation of humanoid robots, video compression, online monitoring of biological processes and online inspection for the semiconductor and food industries. IPCV-LAB places a particular focus on applying its technology to autonomous robotics, especially in the context of autonomous space exploration. Over the last decade, we have conducted research on a near-infrared time-of-flight (NIR ToF) odometry algorithm that can determine the three-dimensional motion, position and orientation of an exploration robot based on processing two multidimensional signals: a near-infrared video signal and a time-of-flight depth signal. These signals are provided by a NIR ToF camera rigidly attached to the side of a robot and facing the ground. Odometry algorithms are crucial for exploration robots operating in areas without GPS, such as the Moon or Mars, as they provide continuous information about motion, position, and orientation. This data enables the robots to detect any deviation from pre-programmed or self-planned trajectories towards scientific objectives.
Poster about the IPCV-LAB (in spanish)
Video about the IPCV-LAB's main project (in spanish)
Video about how the IPCV-LAB contributes to the UCR (in spanish)